
In der industriellen Automatisierung, Robotik und intelligenten Haushaltsgeräten spielen Mikrogetriebemotoren als zentrale Antriebskomponenten eine wichtige Rolle. Dieser Artikel bietet einen detaillierten Vergleich der drei am häufigsten verwendeten Untersetzungssysteme:Stirnradgetriebemotoren, Planetengetriebemotoren, Und Schneckengetriebemotoren. Wir untersuchen ihre internen Strukturen, Hauptvorteile, typischen Anwendungsszenarien und Leistung anhand von Testdaten aus der Praxis und helfen Ingenieuren und Designern, fundierte Entscheidungen für ihre Projekte zu treffen.
Was ist ein Getriebemotor? Warum verwenden wir ein Getriebe?
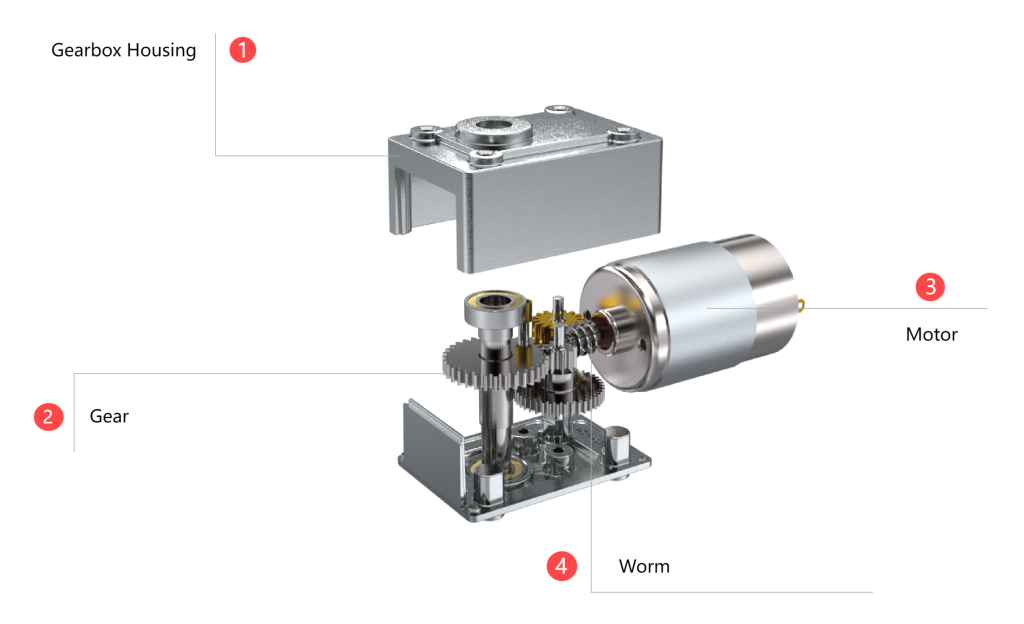
A Getriebemotor ist ein integriertes Antriebssystem, das einen Elektromotor mit einem Untersetzungsgetriebe kombiniert. Im Vergleich zu einem eigenständigen Motor wandelt es die Leistung bei hoher Geschwindigkeit und niedrigem Drehmoment effektiv in eine Leistung bei niedriger Geschwindigkeit und hohem Drehmoment um. Diese Umwandlung verbessert die Tragfähigkeit, die Übertragungseffizienz und die Betriebsstabilität der Anlage und macht es ideal für Anwendungen, die eine präzise Bewegungssteuerung und ein hohes Drehmoment bei niedrigen Geschwindigkeiten erfordern.


Stirnradgetriebe – Stirnradgetriebemotor
Was ist ein Stirnradgetriebemotor?
Die Stirnradgetriebestruktur ist die grundlegendste und am weitesten verbreitete Art von Untersetzungssystemen. Sie besteht aus einer mehrstufigen, kaskadierten Getriebeanordnung, die in einem kompakten Getriebe untergebracht ist – in der Branche allgemein als „Turmtyp” Untersetzungsstruktur.

Stirnradgetriebe können sowohl in rundes Stirnradgetriebe Und Vierkantstirnradgetriebe Konfigurationen, die eine hervorragende Flexibilität bei der Maßgestaltung und Kompatibilität mit verschiedenen Montageanforderungen bieten.


Die Vor- und Nachteile von Stirnradgetrieben – Stirnradgetriebemotor
Im Vergleich zur Planetengetriebestruktur und zur Schneckengetriebestruktur weist die Stirnradgetriebestruktur offensichtliche Vor- und Nachteile auf. Bei der Auswahl des Getriebes für Anwendungen sollten wir die folgenden Punkte berücksichtigen:
Stirnradgetriebemotor – Vorteile
- Einfaches Design mit geringen Herstellungskosten
- Unterstützt eine große Bandbreite an Untersetzungsverhältnissen (bis zu 1:1000+)
- Flexible Gehäuseoptionen: rund oder quadratisch
- Kompakt und einfach in kleine Räume zu integrieren
Stirnradgetriebemotor – Nachteile
- Geringerer Wirkungsgrad als Planetengetriebe
- Eingeschränkte Belastbarkeit, höherer Verschleiß bei Belastung
- Höhere Geräuschentwicklung bei hohen Geschwindigkeiten
Planetengetriebe – Planetengetriebemotor
Was ist ein Planetengetriebemotor?
Wie der Name schon sagt, Planetengetriebe ähnelt der Struktur eines Sonnensystems, bei dem sich mehrere Planetenräder um ein zentrales Sonnenrad drehen und gleichzeitig mit einem äußeren Zahnkranz kämmen.
Der Reduktionsprozess beginnt mit der Sonnenrad montiert auf der Abtriebswelle des Motors. Es überträgt das Drehmoment auf die umgebende Planetengetriebe, die sich im Hohlrad drehen und in dieses eingreifen. Bei mehrstufigen Getrieben wird die Kraft vom Planetensatz der ersten Stufe auf das nächste Sonnenrad übertragen, wodurch eine kompakte, hochstufige Untersetzung mit hervorragender Lastverteilung und Übertragungseffizienz ermöglicht wird.

Die Vor- und Nachteile des Planetengetriebes – Planetengetriebemotor
Jede Untersetzungsstufe in der Planetengetriebestruktur wird gemeinsam durch mehrere Zahnräder unterstützt. Diese Struktur verbessert die Belastbarkeit und Übertragungseffizienz des Getriebes.
Planetengetriebemotor – Vorteile
- Mehrere Gänge (4–5) teilen sich die Last in jeder Stufe, was zu einer starken Drehmomentkapazität führt
- Hohe Rundlaufgenauigkeit und sanfte Übertragung für hohe Effizienz
- Niedriges Betriebsgeräusch, geeignet für lärmsensible Umgebungen
Planetengetriebemotor – Nachteile
- Erfordert hohe Bearbeitungspräzision, was zu höheren Herstellungskosten führt
- Eine feste Position der Abtriebswelle schränkt die Flexibilität bei der Konstruktion ein
Schneckengetriebe – Schneckengetriebemotor
Was ist ein Schneckengetriebemotor?
Das bemerkenswerteste Merkmal eines Schneckengetriebeuntersetzung Mechanismus ist seine selbsthemmend Natur, d.h. es wird nach einem Stromausfall nicht rückgängig gemacht.
Ein Schneckengetriebe-Untersetzungsmechanismus umfasst ein Schneckenrad auf der Abtriebswelle des Motors und überträgt kinetische Energie durch die Übertragung zwischen der Schnecke und den Zahnrädern.
Die Vor- und Nachteile von Schneckengetrieben – Schneckengetriebemotor
Schneckengetriebemotor – Vorteile
- Eingebaute Selbstverriegelungsfunktion: verhindert das Zurückfahren bei ausgeschalteter Stromversorgung
- Ermöglicht eine Drehmomentabgabe von 90 Grad, ideal für platzbeschränkte Layouts
- Leiser und stabiler Betrieb, geeignet für die Innen- oder Haushaltsautomatisierung
Schneckengetriebemotor – Nachteile
- Geringere Übertragungseffizienz aufgrund hoher Gleitreibung (typischerweise <60%)
- Wärmeentwicklung und Verschleiß können bei Dauerbelastung die Lebensdauer verkürzen
- Nicht geeignet für Hochleistungs-Industrieanwendungen mit hohem Drehmoment
Stirnradgetriebemotor vs. Planetengetriebemotor vs. Schneckengetriebemotor
Um die Verzögerungsleistung dieser drei Getriebe intuitiver vergleichen zu können, vergleichen wir die tatsächlichen Testdaten dieser drei Getriebe (Stirnradgetriebe vs. Planetengetriebe vs. Schneckengetriebe).
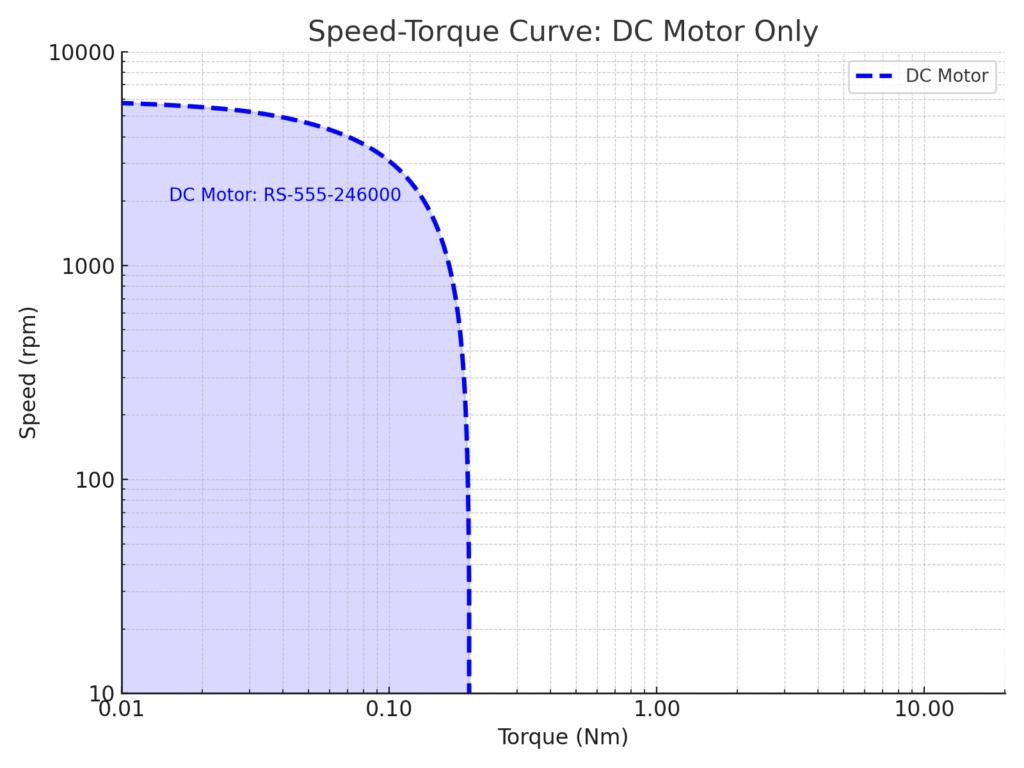
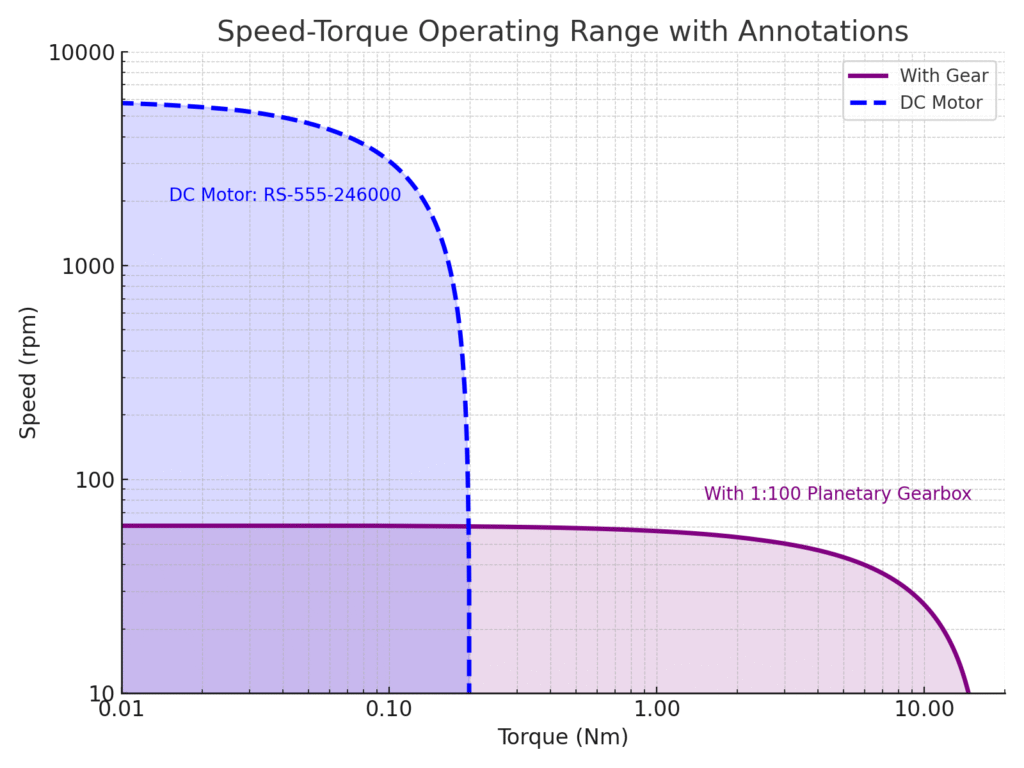
Hier wählen wir den gleichen DC-555-Motor 24V6000 mit drei verschiedenen Getrieben – SG-100K, PG36-99,5K, WGM4058-86KDiese drei Modelle entsprechen einem Stirnradgetriebemotor mit einer Untersetzung von 1:100, einem Planetengetriebemotor mit einer Untersetzung von 1:99,5 und einem Schneckengetriebemotor mit einer Untersetzung von 1:86.


Testergebnisse
| Modell | U (V) | Ich (A) | P1 (W) | T (N·m) | n (U/min) | P2 (W) | Max EFF (%) |
| PG36-555 | 24 | 1 | 24.06 | 2.09 | 52.4 | 11.51 | 47.84 |
| SG-555 | 24 | 0.768 | 18.41 | 1.497 | 51.2 | 8.031 | 43.6 |
| WGM4058-555 | 24 | 1.253 | 30.1 | 1.398 | 52.83 | 7.731 | 25.7 |
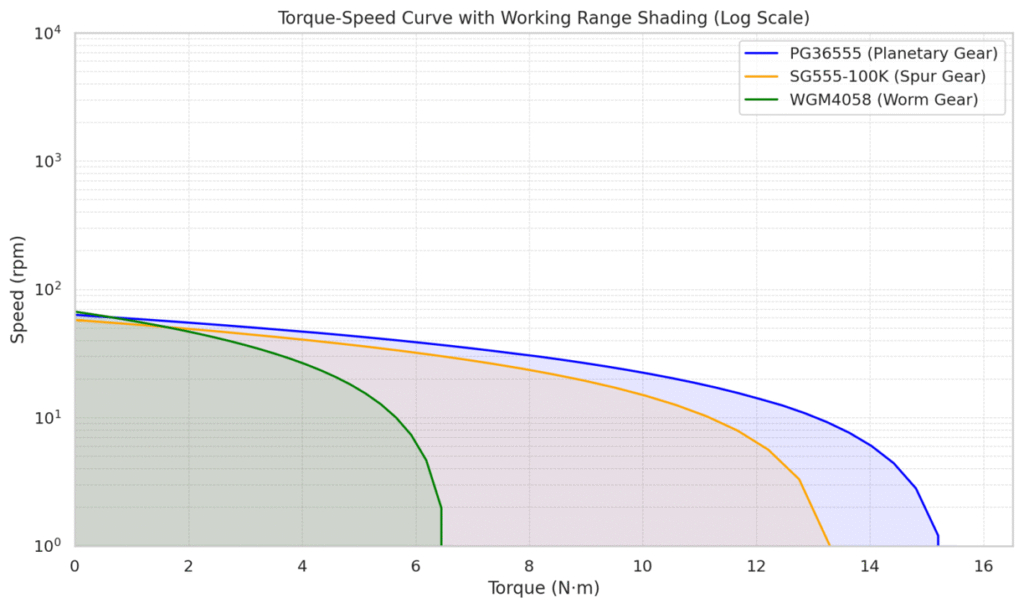
Anhand der Motorleistungskurven lässt sich erkennen, dass alle drei Getriebemotortypen – mit ähnlichen Übersetzungsverhältnissen – nahezu identische Leerlaufdrehzahlen aufweisen. Sobald jedoch eine Last angelegt wird, Schneckengetriebemotor erreicht sowohl seinen Nennarbeitspunkt als auch sein Stillstandsdrehmoment viel früher, Stillstand bei ca. 6 N·m des Ausgangsdrehmoments.
Im Gegensatz dazu Stirnradgetriebemotor und Planetengetriebemotor weisen ähnliche Leistungskurven auf unter Last. Das heißt, die Planetengetriebemotor übertrifft den Stirnradgetriebemotor sowohl in Bezug auf Spitzenwirkungsgrad im Nennpunkt und maximales Stillstandsdrehmoment, was auf eine überlegene Lasthandhabungsfähigkeit bei anspruchsvollen Anwendungen hinweist.




{kind=link}